Projects
- Amarsi Benchmark Framework
We enthusiastically invite interested researchers to participate this benchmark in order to provide the community with a standardized and systematic comparison between different state-of-the-art algorithms in motion generation.
UNDER CONSTRUCTION
- AMiRo-OS
The AMiRo-OS project comprises the software framework for the microcontroller-based real-time modules of the Autonomous Mini Robot (AMiRo).
This not only includes the operating system (AMiRo-OS), but also the AMiRo-BLT bootloader, a collection of low-level periphery drivers (AMiRo-LLD) as well as the real-time middleware μRtWare.... - Articulated Scene Model
The software implements a state-of-the-art algorithm for three dimensional scene segmentation. The algorithm intends to build up a robust static background model of the scene and extracts moveable and highly dynamic objects in the foreground. For system integration the package also includes application nodes for middleware connection and grabbing/visualization purposes....
- BielefeldTypeLibrary
BTL - The Bielefeld Type Library (BTL)¶
The Bielefeld Type Library (BTL) is a collection of XML-based data descriptions that are exchanged between components (e.g. Icewing) or systems (e.g. BIRON/ToBI). It provides functionality for parsing/creating data objects and is currently available in C++/Java. For more detailed info please refer to the wiki....
- BRIX 2
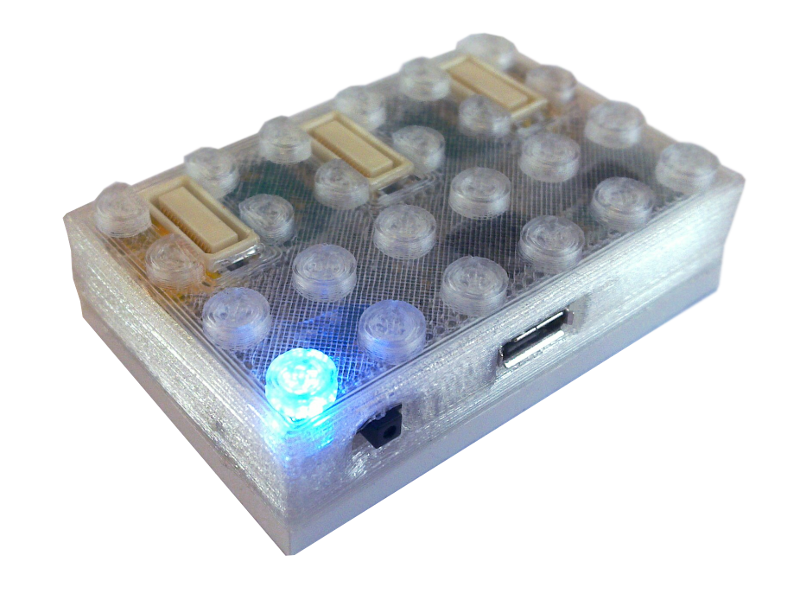
BRIX₂ is a compact, extensible and easy-to-use physical computing platform.
- CITEC Gentoo Portage Overlay
This is a repository of gentoo ebuilds mostly of software packages developed within the University of Bielefeld (CITEC/CoR-Lab) but also of open source software from third parties. You may use this overlay, please do not hesitate to file bugs. Be aware to use this overlay at your own risk. ...
- Cognitive Interaction Toolkit
The Cognitive Interaction Toolkit provides a unified ecosystem for linked research artifacts in the domain of interactive intelligent systems. It combines a semantic catalog indexing and linking software components, system instances, data sets, and publications with a continuous integration, testing and deployment process to facilitate improved and reproducible experimental processes....
- emblued
Emblued is an embedded Bluetooth daemon which enables embedded Linux devices to serve as a Bluetooth network access point. It configures the BlueZ manager via D-Bus and implements a pin agent to handle the authentication with the remote Bluetooth devices....
- Finite State Machine Based Testing
This framework introduces a generic and configurable state machine based process: F inite S tate M achine T esting to automate environment setup, system bootstrapping, functional system tests, result assessment, exit and clean-up strategies....
- FuncSim (scanpath similarity method)
On this page you will find the Matlab code of our functionally sequenced scanpath similarity method that compares and evaluates scanpath similarity according to a task's inherent sequence of functional units. FuncSim reveals whether gaze characteristics are similar in the same functional units of a task, opposed to when participants are engaged in different functional units of the task. In addition, it calculates a random baseline, i.e. similarity of one of the observed scanpaths to its scrambled derivative....
- GazeTK
A framework for gaze-based interaction.
If you are interested of using GazeTk or want to have general information, please checkout our website: http://gazetk.eyemovementresearch.com/.
If you are a developer, you will find technical details in our wiki: https://opensource.cit-ec.de/projects/gazetk/wiki....
- Hand trajectory data
This archive contains the hand trajectory data of 25 participants. During the experiments, each participant completed several of the obstacle point configurations. These point configurations are detailed in the figure which can be found in the README contained in the zip file and can also be found in the MAT file 'pointConfigurations.mat'....
- Image Component LibraryICL is a novel C++ computer-vision library developed in the neuroinformatics group of the University of Bielefeld. It unifies both performance and user friendliness. ICL provides a large set of simple-to-use classes and functions to facilitate development of complex computer vision applications....
- IPAACA
Incremental Processing Architecture for Artificial Conversational Agents
This is IPAACA version 2, a mirror of the AG SCS development repository.
- ivTools
A tool-set for research related to insect vision:
ivTrace is a GUI utility for the analysis of behavioural data (video sequences)
ivRender is an OpenGL-based renderer for spherical images - Kinematic data of grasping movements directed towards virtual and real objects
Kinematic data of grasping movements directed towards virtual and real objects was generated for the MINDA and CORTESMA CITEC Projects.
Eleven right handed subjects (age: 24-39 years, 4 women) participated in a series of three experiments. All subjects had normal or corrected-to-normal vision and had no known impairments related to arm or hand movement. All subjects gave written informed consent to be part of the study. The experiment was carried out according to the principles laid out in the 1964 Declaration of Helsinki. Subjects performed all three experiments in the same order, starting with Experiment 1, directly followed by Experiment 2, and then Experiment 3.... - Kinematic Data of Stick Insect Locomotion
Insects like the stick insect can walk on rough terrain, climb obstacles, and use their legs for other behavioural tasks such as searching or reaching. These complex movements are coordinated by a fairly small, experimentally amenable and reasonably well-studied nervous system. Because of the resource-efficient information processing for solving complex behavioural tasks, the analysis and modelling of insect locomotion have been proposed as a basis for improving artificial autonomous walking robots....
- libmunkres
This library implements the Munkres' Assignment Algorithm in c++.
It is based on the c# version of Robert A. Pilgrim (see his implementation here).Algorithm details can be found in the paper "Algorithms for Assignment and Transportation Problems" by James Munkres (March 1957)....
- libtinyconfig
This library implements a very basic configuration file management.
It is lightweight and comes without any complex dependencies. - libximu
This is an open source c++ re-implementation of the x-IMU API and is used to access the IMU device sold by x-IO technologies.
The code is based on the original published x-IMU API 13.1
source code in c# and was modified to suit our needs.... - meta-openrobotix
Meta-OpenRobotix is a layer for the OpenEmbedded project. It contains recipes and patches for the software generation (cross compile) of boot loader, Linux kernel, driver and additional software for mini robots like the BeBot.
- meta-bebot
Support layer for BeBot Board Support Packages (BSP)
- meta-cerebric
Support layer for Cerebric Board Support Packages (BSP)
- Open Research at CITEC
Welcome to the CITEC Open Research Server.
The CITEC Open Research Server hosts Open Source software and Open Data projects related to cognitive interaction evolved from the research at the Center of Excellence Cognitive Interaction Technology (CITEC) . We invite you to use our software and databases for your projects and collaborate with us in development....
- OpenKC
A library for real-time communication to and from the Kuka LWR using either FRI (new) or RSI-XML (old).
You will find the SVN repository here:
https://opensource.cit-ec.de/svn/openkc
TAR-Balls are in the Files section.
- openrobotix-player
OpenRobotix-Player is a collection of add-ons drivers for the Player server and configurations for the Player server and Stage simulator.
- openrobotix-senseact
OpenRobotix-SenseAct is a collection of Linux kernel drivers for the BeBot mini robot.
- openrobotix-utils
OpenRobotix-Utils is a collection of utilities and demos for BeBot mini robot. It consists of simple programs which serve as programming examples for the usage of the other OpenRobotix projects.
- QALD-3 (Query over Linked Data)
Multilingual Question Answering over Linked Data: QALD-3 Dataset: This dataset comprises 200 natural language questions over DBpedia 3.8, annotated with SPARQL queries and answers. It was part of the QALD-3 open challenge: questions 1-100 constitute the training question set and questions 101-200 constitute the test question set....
- ReSAI
Remote Sensor Actuator Interface (ReSAI)¶
The Remote Sensor Actuator Interface (ReSAI) allows the remote introspection via external devices, e.g. android phones. It enables to aquire information about internal data and processes from software elements of a complex and/or distributed system such as robots (e.g. BIRON/ToBI or iCub). ReSAI was developed for further extension in terms of additional information channels or different client architectures....
- ReSEED (Social Event dEtection Dataset)
This dataset comprises 200 natural language questions over DBpedia 3.8, annotated with SPARQL queries and answers. It was part of the QALD-3 open challenge: questions 1-100 constitute the training question set and questions 101-200 constitute the test question set. ...
- RML - RobotMetaLogger
Logging from multiple robot frameworks in a consistent fashion, with semi-automatic integration of additional sources such as video-cameras, screen-captures and microphones.
The Git repository is at https://opensource.cit-ec.de/git/rml.git
See the Feature List for current and planned features....
- RobotReality
Robot Reality - A motion capture system that makes robots become human and vice versa
The RobotReality System allows a human operator to control an anthropomorphic robotic head by wearing a combined motion capture and display helmet. It allows the direct and live transfer of human facial ...
- SCIE: Spinal Cord Injury Information Extraction
The purpose of SCIE — Spinal Cord Injury Information Extraction — is to extract relevant information about pre-clinical experiments on spinal cord injury treatments from bio-medical research papers. SCIE tries to accomplish this goal by using a large ontological database, a set of manually defined rules and machine learning....
- stuff
stuff - Scientist's Treasure of Useful Files and Forms
General Git: https://openresearch.cit-ec.de/git/stuff.git
Textile2Table Git: https://openresearch.cit-ec.de/git/stuff.textile2table.git - Surface mesh
Surface_mesh is a halfedge-based mesh data structure for representing and processing 2-manifold polygonal surface meshes. It is implemented in C++ and designed with an emphasis on simplicity and efficiency.
Download¶
The latest release is version 1.1. You can download a copy here:...
- TCS Alignment Toolbox
IMPORTANT: A NEW AND EASIER-TO-USE VERSION OF THIS TOOLBOX IN PYTHON IS AVAILABLE AT https://gitlab.ub.uni-bielefeld.de/bpaassen/python-edit-distances/
This Java Toolbox provides several edit distance algorithms between two data structures, be it lists, sets, or trees, which may contain arbitrary kinds of nodes. The toolbox also provides options to parametrize the edit distance, to compute optimal solutions via backtracing, and to compute gradients of the edit distance with respect to metric parameters. The toolbox is written in Java 1.7 and is compatible with MATLAB (R)....
- XTT - eXtensible Task Toolkit
XTT implements the Task-State-Pattern, to make task interaction easy and robust. Tasks are an appropriate model for any robot action that is not instantaneous (which, given the real-world, is almost all of them). For tasks, servers can report both when a task begins and when it ends independently, and there are also (optional) functions for updating task goals and canceling tasks, all in one consistent interface. Furthermore, the toolkit supports both synchronous and asynchronous use. ...

Also available in: Atom